Einleitung
Weltweit werden C-Bögen flächendeckend in den Operationssälen eingesetzt. Nahezu jede
operative medizinische Fachrichtung nutzt heutzutage diese Technologie. Gerade aus
dem Arbeitsalltag der Unfallchirurgen und Orthopäden ist die intraoperative Bildgebung
nicht mehr wegzudenken. An der Weiterentwicklung und Verbesserung der C-Bögen wird
seit vielen Jahren gearbeitet. Besonders für die Etablierung neuer, minimalinvasiver
Operationsverfahren war eine Optimierung der intraoperativen Bildgebung unausweichlich.
Die Entwicklung von C-Bögen mit Flachdetektortechnologie erbrachte hierbei eine signifikante
Verbesserung in der intraoperativen Bildgebung. Dies führte nicht nur zu einer Aufwertung
der Bildqualität, sondern zu einer zusätzlichen Vergrößerung des Bildvolumens. Zunächst
konnte dies nur in stationären C-Bögen integriert werden. Mittlerweile sind mobile
C-Bögen mit Flachdetektortechnologie verfügbar. Durch ihre mannigfaltigen Verwendungsmöglichkeiten
sind diese C-Bögen für die unterschiedlichsten operativen Verfahren hervorragend geeignet.
Neue innovative Operationsverfahren verlangen zusätzlich eine Optimierung der Arbeitsabläufe
sowie eine interaktive Vernetzung der unterschiedlichen intraoperativen Geräte. Dadurch
kam es in den letzten Jahren zu einer zunehmenden Verbreitung von Hybridoperationssälen.
Hierbei wird ein stationäres Bildgebungssystem in einen Operationssaal integriert.
Mittels dieser Flachdetektorgeräte können 2-D-Bilder akquiriert werden, welche im
Anschluss zu einem 3-D-Bild zusammengesetzt werden können. Im Gegensatz zu den üblichen
3-D-Standard-C-Bögen bietet dieses Verfahren eine CT-ähnliche Qualität. Zudem kann
dieser 3-D-Scan deutlich schneller durchgeführt werden. In Kombination mit einem Navigationssystem
können so komplexe Operationsverfahren an schwierigen anatomischen Regionen durchgeführt
werden. Ziel dieses Artikels ist es, die Leistungsfähigkeit der Flachdetektortechnologie
zu demonstrieren.
Teil 1: Mobile C-Bögen mit Flachdetektorentechnologie
Mobile C-Bögen sind seit Jahrzehnten in der Chirurgie im Einsatz. Die intraoperative
Bildgebung unterstützt die Chirurgen bei der Visualisierung von anatomischen Strukturen
und Implantaten sowie bei der Qualitätssicherung. Der Trend zur minimalinvasiven Chirurgie
ist für die Entwicklung von mobilen C-Bögen insofern wichtig, als diese bildgebenden
Geräte durch die Mobilität, die Kompatibilität mit bestehender OP-Infrastruktur und
die Kostenposition eine zentrale Rolle im OP spielen. Dabei wird die Präzision und
Qualität der Bilder immer wichtiger. Die Integration der Flachdetektortechnologie
in die mobilen C-Bögen trägt diesem Trend Rechnung. Diese Detektoren wurden zu Beginn
des Jahrtausends anstelle von Bildwandlern zunächst in die stationären High-End-C-Bögen
und dann in die mobilen C-Bögen integriert. Zusätzlich zur Bildqualität geht der Trend
bei den mobilen C-Bögen zur einfacheren Handhabung und Motorisierung ([Abb. 1]).
 Abb. 1 Schematische Darstellung eines Flachdetektors mit indirekter Umwandlung von Röntgenstrahlung
auf Basis von Cäsiumjodid (CsI) und einer aktiven Matrix aus amorphem Silizium (a-Si).
Abb. 1 Schematische Darstellung eines Flachdetektors mit indirekter Umwandlung von Röntgenstrahlung
auf Basis von Cäsiumjodid (CsI) und einer aktiven Matrix aus amorphem Silizium (a-Si).
Klinische Vorteile der mobilen C-Bögen mit Flachdetektor
Sichtfeld
Wenn die Flachdetektortechnologie (FD-Technologie) mit einem intelligenten Blendensystem
ausgestattet ist, liefert sie rechteckige Bilder eines Bereichs von 30 × 30 cm und
bietet damit eine um bis zu 25 % größere Abdeckung als konventionelle Bildverstärker.
Dies ermöglicht die Visualisierung von anatomischen Regionen in der unmittelbaren
Umgebung des Operationsfelds sowie von größeren Teilen langer Knochen. Bei Schrägeinblendung
sind die Darstellung von schräg zur C-Bogen-Position verlaufenden Strukturen und die
Drehung des Bildes in die anatomische Standardansicht möglich ([Abb. 2] und [3]).
 Abb. 2 Vergleich des Sichtfelds bei einem konventionellen C-Bogen (links) und einem mobilen
C-Bogen mit Flachdetektor.
Abb. 2 Vergleich des Sichtfelds bei einem konventionellen C-Bogen (links) und einem mobilen
C-Bogen mit Flachdetektor.
 Abb. 3 Schrägeinblendung mit Darstellung vom schräg zur C-Bogen-Position verlaufenden Unterarm.
Abb. 3 Schrägeinblendung mit Darstellung vom schräg zur C-Bogen-Position verlaufenden Unterarm.
Grauskala und Differenzierung von Strukturen
Die Grauskala moderner Flachdetektoren ist etwa 4-mal so groß wie jene konventioneller
Bildverstärker. Der daraus resultierende höhere Kontrast ermöglicht dem Chirurgen,
anatomische Strukturen besser zu unterscheiden ([Abb. 4], [5], [6]).
 Abb. 4 Schematische Darstellung der Grauskala von Bildverstärkern.
Abb. 4 Schematische Darstellung der Grauskala von Bildverstärkern.
 Abb. 5 Schematische Darstellung der Grauskala von Flachdetektoren, 4 × höher.
Abb. 5 Schematische Darstellung der Grauskala von Flachdetektoren, 4 × höher.
 Abb. 6 Eine höhere Grauskala führt zum höheren Kontrast und zu besserer Unterscheidung anatomischer
Strukturen von Implantaten.
Abb. 6 Eine höhere Grauskala führt zum höheren Kontrast und zu besserer Unterscheidung anatomischer
Strukturen von Implantaten.
Mehr Pixel, höhere Genauigkeit
Konventionelle C-Bögen mit Bildverstärkern liefern Bilder mit 1024 × 1024 Pixel, C-Bögen
mit modernen Flachdetektoren Bilder mit 1535 × 1535 Pixel.
Die höhere Pixelzahl kombiniert mit der feineren Graustufendifferenzierung und dem
größeren Dynamikbereich sorgt für eine höhere Präzision der intraoperativen Bilder
([Abb. 7]).
 Abb. 7 Bild einer 5-mm-Schraube, aufgenommen mit einem mobilen C-Bogen mit Flachdetektor.
Abb. 7 Bild einer 5-mm-Schraube, aufgenommen mit einem mobilen C-Bogen mit Flachdetektor.
Magnetfelder und Bildverzerrung
Magnetfelder, selbst das der Erde, beeinflussen die Funktion der Elektroden der Bildverstärkerröhre.
Infolgedessen können die Bilder insbesondere in den Randbereichen Verzerrungen aufweisen,
zusätzlich können in diesen Bereichen die Bilder unscharf sein. Dieses Problem tritt
bei mobilen C-Bögen mit modernen Flachdetektoren nicht mehr auf ([Abb. 8]).
 Abb. 8 a und b
a Verzerrtes Bild eines Bildverstärkers. b Verzerrungsfreies Bild eines Flachdetektors.
Abb. 8 a und b
a Verzerrtes Bild eines Bildverstärkers. b Verzerrungsfreies Bild eines Flachdetektors.
Die Bilder sind klarer und verzerrungsfrei.
Weniger Platzbedarf für den C-Bogen, mehr Platz für den Chirurgen
Der Abstand zwischen dem Fokuspunkt der Röntgenquelle und dem Bildempfänger wird als
Fokus-Bildempfänger-Abstand (engl. „Source to Image Distance“, SID) bezeichnet. Bei
konventionellen C-Bögen mit Bildverstärker beträgt dieser Abstand ca. 100 cm, bei
mobilen C-Bögen mit modernen Flachdetektoren 110 cm ([Abb. 9]).
 Abb. 9 Durch den Raumgewinn von ca. 10 cm hat der Chirurg mehr Bewegungsfreiheit bei Eingriffen,
z. B. zur Handhabung chirurgischer Instrumente.
Abb. 9 Durch den Raumgewinn von ca. 10 cm hat der Chirurg mehr Bewegungsfreiheit bei Eingriffen,
z. B. zur Handhabung chirurgischer Instrumente.
Entscheidende Verbesserungen bei Bedienbarkeit und Workflow
Die Einführung von neuen C-Bogen-Plattformen mit der Flachdetektortechnologie geht
mit Innovationen auch im Bereich der Bedienbarkeit, Motorisierung und dem Workflow
einher. So liegt ein weiterer Fortschritt darin, die intraoperative Bildgebung selbst
steuern und kontrollieren zu können.
Der Operateur hat nun über einen Touchscreen am OP-Tisch die direkte Kontrolle über
die Bilder und die motorische Bewegung des C-Bogens aus dem sterilen Bereich in unmittelbarer
Reichweite selbst in der Hand.
Um bspw. Weichteilgewebe zugunsten von Knochenstruktur auszublenden, kann er am Touchscreen
die Strahlendosis und Grauwerte ändern. Außerdem ermöglichen Tasten am Flachdetektor
zur Bedienung elektromechanischer Bremsen dem Chirurgen, den C-Bogen ohne Hilfe Dritter
in die gewünschte Position zu manövrieren, schnell und unkompliziert. Und wenn das
Gesamtsystem während des Eingriffs nicht bewegt werden musste, wie bei Hand- und Sprunggelenken
oder auch an der Wirbelsäule, kann der C-Bogen auf Knopfdruck in eine gespeicherte
Position zurückkehren ([Abb. 10]–[12]).
 Abb. 10 Präoperative motorische Bewegung des mobilen C-Bogens und Speicherung von wichtigen
sich wiederholenden Positionen per Knopfdruck.
Abb. 10 Präoperative motorische Bewegung des mobilen C-Bogens und Speicherung von wichtigen
sich wiederholenden Positionen per Knopfdruck.
 Abb. 11 Bremssteuerung am Flachdetektor ermöglicht dem Chirurgen, den C-Bogen ohne Hilfe
Dritter in die gewünschte Position zu manövrieren.
Abb. 11 Bremssteuerung am Flachdetektor ermöglicht dem Chirurgen, den C-Bogen ohne Hilfe
Dritter in die gewünschte Position zu manövrieren.
 Abb. 12 Der Operateur hat über einen Touchscreen am OP-Tisch die direkte Bildkontrolle aus
dem sterilen Bereich selbst in der Hand.
Abb. 12 Der Operateur hat über einen Touchscreen am OP-Tisch die direkte Bildkontrolle aus
dem sterilen Bereich selbst in der Hand.
Kollimation
Moderne mobile C-Bögen mit der Flachdetektortechnologie bieten ein innovatives Kollimationssystem,
mit dem Bildausschnitte optimal auf die interessierende Region fokussierbar sind und
die Bildqualität zusätzlich gesteigert wird.
Während im konzentrischen Bild älterer C-Bögen nur ein relativ kleiner Knochenabschnitt
erschien, können jetzt längere Strecken dargestellt werden, um z. B. Extremitätenachsen
zu kontrollieren und Fehlstellungen vorzubeugen. Und mit der asymmetrischen Kollimation
lassen sich Strukturen im Randbereich einfangen, die sonst außerhalb des symmetrischen
Bildes liegen würden. Im Idealfall kann das rechteckige Bild aus jeder Richtung, ähnlich
einer digitalen Fotobearbeitung, „zugeschnitten“ werden. Damit entfällt oftmals eine
Änderung der Patientenposition und die Bildqualität wird durch ausgeblendete Artefakte,
wie sie durch das Metall des OP-Tisches entstehen können, verbessert. Zusätzlich kann
die Aufnahme rotiert werden, bis sie mit der Knochenposition im Patienten übereinstimmt.
Flachdetektortechnologie und 3-D
Die 30 × 30-cm-Flachdetektortechnologie bietet darüber hinaus großes Potenzial für
den zukünftigen Einsatz in der intraoperativen 3-D-Bildgebung. Der hohe Dynamikbereich
der Flachdetektoren verringert die „Truncation-Artefakte“ im 3-D-Volumen, was zu einer
besseren Darstellung insbesondere an den Objektgrenzen führt. Durch großflächige Flachdetektoren
(30 × 30 cm) lässt sich ein größeres und optimiertes Volumen rekonstruieren. Eine
Verbesserung der 3-D-Navigationsgenauigkeit kann dadurch erzielt werden, dass die
durch das Magnetfeld verursachten Bildverzerrungen reduziert werden.
Teil 2: Hybridoperationssaal
Die Entwicklung minimalinvasiver Techniken und die rasanten Fortschritte in der Chirurgie
fordern die Integration fortschrittlicher Bildgebungstechnologien in den Operationssaal.
Unter einem Hybridoperationssaal (OP) versteht man den Einbau eines stationären Bildgebungssystems
in einen Operationssaal, in dem interventionelle und offene Verfahren kombiniert werden
können.
Das Fehlen des Tastvermögens und des natürlichen 3-dimensionalen Sehens bei minimalinvasiven
chirurgischen Eingriffen verlangt nach bildgebenden Verfahren und die Visualisierung
spielt dabei eine zentrale Rolle. Die Vernetzung unterschiedlicher Bildgebungsverfahren,
um Strukturen unterhalb der Oberfläche sichtbar zu machen und chirurgische Instrumente
sicher zu führen, ist ein Vorteil dieses neuen Konzepts. Um Hybrid-OPs zu entwerfen,
die bestehende und aufkommende Arbeitsabläufe unterstützen, ist ein umfassendes Verständnis
der gängigen und zukünftigen Technologien unerlässlich.
Die laufende Weiterentwicklung der interventionellen und chirurgischen Verfahren verlangt
nach der Gestaltung eines neuen Arbeitsumfelds, das den interdisziplinären Teams ermöglicht,
sich zu integrieren und zu kollaborieren. Vorgestellt wurde dieses neuartige Konzept
zum ersten Mal im Jahr 1990, als der erste Hybrid-OP für endovaskuläre Verfahren am
Herz-Lungen-Zentrum in Monaco eingerichtet wurde. Herz- und Gefäßchirurgen entwickelten
die endovaskulären Behandlungsabläufe zunächst, um degenerierte Herzklappen und Gefäßaneurysmen
zu behandeln. Der allgemeine Trend in der Chirurgie hin zu minimalinvasiven Verfahren
und die engagierten technischen Entwicklungen haben sich jedoch schnell auf nahezu
alle chirurgischen Fachgebiete ausgeweitet.
Neue Technologien werden entwickelt, um den speziellen Anforderungen gerecht zu werden.
Dazu gehören u. a. eine benutzerfreundliche Bedienoberfläche, Datenverbindungen und
Datenanzeige, Bilddatenüberlagerung von mehreren Bildgebungsverfahren und die 3-dimensionale
Darstellung der Anatomie in Echtzeit, um nur einige zu nennen. Zukünftig werden Operationssäle
eine große Bandbreite der zentralen chirurgischen Systeme miteinander vernetzen können.
So z. B. Robotertechnik, Röntgengeräte, Navigation, Ultraschall und Endoskopie. Damit
zeigt sich, wie wichtig es ist, bei der Gestaltung eines Hybrid-OPs nicht nur gegenwärtige
Bedürfnisse und Systeme zu berücksichtigen, sondern auch die sich rasch entwickelnden
Therapiemöglichkeiten und zukünftigen Anforderungen mit einzubeziehen. Zur Verfügung
steht ein dedizierter, robotergestützter chirurgischer C-Bogen, der, im Vergleich
zu herkömmlichen Systemen, für mehr Flexibilität im Operationssaal sorgt. Dieses vom
Chirurgen gesteuerte Mehrachssystem bietet volle Flexibilität und Rundumzugang zum
Patienten und garantiert somit präzise und schnelle Patientenversorgung, Bildgebung
und Parkpositionen eingeschlossen [3] ([Abb. 13]).
 Abb. 13 Der Hybridoperationssaal (OP) verfügt über einen optimalen disziplinübergreifenden
Aufbau. Zentrales Element dieses OPs ist das stationäre Bildgebungssystem mit dem
integrierten Operationstisch.
Abb. 13 Der Hybridoperationssaal (OP) verfügt über einen optimalen disziplinübergreifenden
Aufbau. Zentrales Element dieses OPs ist das stationäre Bildgebungssystem mit dem
integrierten Operationstisch.
Aufbau eines Hybrid-OPs
Voraussetzung für einen Hybrid-OP ist die sorgfältige Planung des Raumes, die mit
einbezieht, welchen Platz die Bildgebungstechnik und die Eingliederung der unterschiedlichen
OP-Komponenten in ein funktionales Gesamtsystem brauchen. Alle Disziplinen sollten
schon zu Beginn der Planungsphase in die Projektierung des neuen Operationssaals mit
einbezogen werden. Ein multifunktionaler Raum benötigt eine präzisere Gestaltung und
ein funktionaleres Arbeitskonzept als ein Standard-OP. Empfohlen wird eine Raumgröße
von mindestens 70 m² oder mehr. Hinzu kommen ein Technik- und ein Schaltraum von 10 m².
Die Planung und Umsetzung eines Hybrid-OPs dauert normalerweise 12–18 Monate, je nachdem,
ob ein vorhandener Saal umgebaut oder ein Neubau errichtet werden soll.
Zusätzliche Aspekte sollten bei der Planung des Operationstischs berücksichtigt werden,
dazu gehören dessen Position im Raum, die Strahlendurchlässigkeit (Carbon-Tischplatte),
die Kompatibilität und die Integration der Bildgebungsgeräte in den Operationstisch,
z. B. die von Robotern. Chirurgen, und im Besonderen orthopädische Chirurgen, allgemeine
Chirurgen und Neurochirurgen, erwarten i. d. R. einen Tisch mit segmentierter Tischplatte
zur flexiblen Patientenlagerung. Die speziell für Operationen entwickelten, frei schwimmenden
Angiografietische mit vertikaler und lateraler Kippung könnten als Kompromiss in Erwägung
gezogen werden. Die höchste Nutzungsflexibilität kann jedoch nur durch den Einbau
eines OP-Systemtischs erreicht werden. Eine detaillierte Analyse der Arbeitsabläufe
im OP ist erforderlich, in die alle klinischen Disziplinen, die Anästhesiologie und
das Pflegepersonal involviert sein müssen. Die optimale OP-Position des Patienten
muss sowohl in Bezug auf die Narkose als auch auf das Bildgebungssystem ausgewertet
werden. Sterilität muss ständig gewährleistet sein, solange der Chirurg, das Pflegepersonal
und die Anästhesie noch Zugang zum Patienten brauchen ([Abb. 14] und [15]).
 Abb. 14 Die Position des Patienten und die sterile Abdeckung sind ausschlaggebend für den
Erfolg eines Hybrid-OPs. Für eine laparoskopische Leberteilresektion muss z. B. der
Tisch hochgestellt (der Kopf zeigt zum Bildgebungssystem) und nach links gedreht werden,
um den bestmöglichen Zugang zum Zielorgan zu garantieren.
Abb. 14 Die Position des Patienten und die sterile Abdeckung sind ausschlaggebend für den
Erfolg eines Hybrid-OPs. Für eine laparoskopische Leberteilresektion muss z. B. der
Tisch hochgestellt (der Kopf zeigt zum Bildgebungssystem) und nach links gedreht werden,
um den bestmöglichen Zugang zum Zielorgan zu garantieren.
 Abb. 15 Für einen minimalinvasiven Eingriff an der Wirbelsäule wird der Patient in Bauchlage
gebracht, mit dem Kopf vom Narkosegerät abgewandt, welches sich am Fuß des Tisches
befindet. Der Patient ist somit optimal positioniert.
Abb. 15 Für einen minimalinvasiven Eingriff an der Wirbelsäule wird der Patient in Bauchlage
gebracht, mit dem Kopf vom Narkosegerät abgewandt, welches sich am Fuß des Tisches
befindet. Der Patient ist somit optimal positioniert.
Fixer C-Bogen mit Flat-Panel-Technologie
Die C-Bogen-CT (Siemens syngo DynaCT) ist ein neues und innovatives Bildgebungsverfahren,
bei dem durch ein C-Bogen-Angiografie-System mit Flachdetektor eine Reihe von 2-dimensionalen
(2-D) Röntgenprojektionen gewonnen werden, um CT-ähnliche Bilder zu erzeugen [5].
Der C-Bogen rotiert innerhalb von ein paar Sekunden um den Patienten und akquiriert
dabei hunderte von Projektionen, die den 3-D-Cone-Beam-Rekonstruktionen als Input
dienen. Zur artefaktfreien Rekonstruktion benötigt man normalerweise mind. einen Scanwinkelbereich
von 180° zusätzlich zum Öffnungswinkel der Röntgenröhre. Dies bedeutet, dass für typische
Angiografiesysteme ein Scanwinkelbereich von mind. 200° Voraussetzung ist. Die anfallenden
Volumendatensätze können entweder als Schnittbilder angezeigt werden oder als 3-D-Datensätze
unter Verwendung der verschiedenen Volume Rendering Techniques (VRT) [2]. Die räumliche Auflösung, die syngo DynaCT bietet, kann im Sub-Millimeter-Bereich
liegen. Zweckbestimmte Protokolle und 1 × 1-Binning machen Auflösungen von 0,1 mm
möglich ([Abb. 16]).
 Abb. 16 Vergleich der Kontrastauflösung zwischen CT und Cone-Beam-CT (syngo DynaCT). Das
hochauflösende syngo DynaCT ermöglicht eine Auflösung von 0,1 mm.
Abb. 16 Vergleich der Kontrastauflösung zwischen CT und Cone-Beam-CT (syngo DynaCT). Das
hochauflösende syngo DynaCT ermöglicht eine Auflösung von 0,1 mm.
Die Detektorgröße von 30 × 40 cm (12″ × 16″) macht die Erfassung eines großen Organs
oder bspw. die Visualisierung des gesamten Beckens inkl. der beiden Beckenarterien
mit nur einem Bild möglich ([Abb. 17]).
 Abb. 17 a und b
a Der große Flachdetektor ermöglicht dem Chirurgen die Erfassung des gesamten Beckens
mit einem einzigen Bild. b Stitching-Protokolle helfen dabei, die Gesamtdarstellung des Zielbereichs zu verbessern.
Abb. 17 a und b
a Der große Flachdetektor ermöglicht dem Chirurgen die Erfassung des gesamten Beckens
mit einem einzigen Bild. b Stitching-Protokolle helfen dabei, die Gesamtdarstellung des Zielbereichs zu verbessern.
Die Möglichkeit der Bildzusammensetzung durch das Zusammenfügen von 2-D-Durchleuchtungsbildern
verhilft zu einer Gesamtdarstellung der Wirbelsäule.
CT-ähnliche Weichteilbildqualität kann im Hybrid-OP, abhängig vom Aufnahmeprotokoll,
durch eine Kontrastauflösung von bis zu 3–5 HU erreicht werden (im Vergleich zu 1
HU bei einer herkömmlichen CT).
Die Möglichkeit der Bildfusion mit jeglichen präoperativen Bilddaten, also CT oder
MR, erweitert den auf größtmögliche Präzision und Zielführung ausgelegten Operationsplan
([Abb. 18]).
 Abb. 18 Intraoperative MR- und syngo DynaCT-Fusion zur Durchführung einer navigationsgestützten
muskuloskelettalen Tumoroperation. Die Bildfusion gibt dem Chirurgen mehr Information
und erleichtert die Entscheidungsfindung.
Abb. 18 Intraoperative MR- und syngo DynaCT-Fusion zur Durchführung einer navigationsgestützten
muskuloskelettalen Tumoroperation. Die Bildfusion gibt dem Chirurgen mehr Information
und erleichtert die Entscheidungsfindung.
Intraoperative 3-D-Bildgebung
Die Integration von 3-D-Bildgebungstechnik in routinemäßige klinische Arbeitsabläufe
im OP bedarf eines gut durchdachten Aufbaus. Da sich die Position der Geräte und des
Personals je nach Art des Eingriffs verändert, ist die Adaptionsfähigkeit des Bildgebungssystems
von Bedeutung, damit es sich an die spezifischen Bedingungen im OP anpassen kann.
Die Integration des Bildgebungssystems in einen OP-Tisch ermöglicht die Bildgebung
auch bei komplizierten chirurgischen Lagerungen, sodass keine Umlagerung für die Aufnahme
nötig ist.
Während der Raum und die chirurgischen Instrumente besondere Anforderungen erfüllen
müssen, um MRI-kompatibel zu sein, und den freien Zugang zum Patienten während einer
CT im OP beeinträchtigen können, hat das Angiografiesystem besondere Vorteile in der
Patientenbehandlung gezeigt und bietet die meiste Flexibilität. Neben der Zugänglichkeit
und der Patientenlagerung hat sich die Bildqualität als ausreichend und präzise erwiesen
[4].
Die Sterilität des Operationsfelds muss während der 3-D-Aufnahmen gewährleistet bleiben.
Die Abdeckung des Patienten mit einer zusätzlichen sterilen OP-Decke und das Befestigen
der Decke rund um den Tisch wahrt die Sterilität und minimiert das Infektionsrisiko
für den Patienten ([Abb. 19]).
 Abb. 19 Die Flexibilität des Systems, der Erhalt der Sterilität und die eigenständige Nutzung
vom Chirurgen gewährleisten eine schnelle und präzise Behandlung.
Abb. 19 Die Flexibilität des Systems, der Erhalt der Sterilität und die eigenständige Nutzung
vom Chirurgen gewährleisten eine schnelle und präzise Behandlung.
Während der 3-D-Aufnahmen rotiert der C-Bogen, je nach Bildgebungsprotokoll und Apparat,
3–20 s lang um den Patienten. Der Bediener steuert die Aufnahme von einem steril abgedeckten
Kontrollpult am Tisch oder von einem Gerätewagen.
Visualisierung von 3-D-Röntgen- oder Angiografiebildern
Eine Visualisierung in 3-D ergänzt 2-D-Projektionsbilder um wertvolle Informationen,
wenn es darauf ankommt, komplexe Anatomie oder Pathologie, wie z. B. gebrochene Wirbel
oder rupturierte zerebrale Aneurysmen, verständlich zu machen. Die Strukturen befinden
sich auf einem Datenträger und können durch das Generieren von Querschnitten (doppelt
schräg), durch Rotieren oder Ausschneiden beliebig betrachtet werden. Somit werden
die räumlichen Beziehungen von Strukturen deutlich und die perspektivischen Verkürzungen,
die bei 2-D-Aufnahmen sichtbar sind, können überwunden werden ([Abb. 20]). Während 2-D-Aufnahmen aus Pixeln innerhalb einer Ebene bestehen, besteht die 3-D-Datei
aus Voxeln, d. h. kleinsten Einheiten als Träger der Bildinformation.
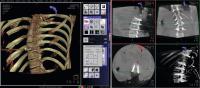 Abb. 20 Die Visualisierung in 3-D zusätzlich zur Visualisierung verschiedener Ebenen in 2-D
hilft dem Chirurgen dabei, Schrauben an der exakten Stelle zu positionieren. Sollten
sich die Schrauben nicht an der exakten Position befinden, kann ihre Position, falls
nötig, direkt im OP korrigiert werden. Mit freundlicher Genehmigung von Prof. Dr.
Ebara, Fujisawa, Japan und Prof. Dr. Banse, Brüssel, Belgien.
Abb. 20 Die Visualisierung in 3-D zusätzlich zur Visualisierung verschiedener Ebenen in 2-D
hilft dem Chirurgen dabei, Schrauben an der exakten Stelle zu positionieren. Sollten
sich die Schrauben nicht an der exakten Position befinden, kann ihre Position, falls
nötig, direkt im OP korrigiert werden. Mit freundlicher Genehmigung von Prof. Dr.
Ebara, Fujisawa, Japan und Prof. Dr. Banse, Brüssel, Belgien.
Navigation und Zielführung
Intraoperative 3-D-Bildgebung kann auch in Verbindung mit Navigationssystemen, die
die Nachverfolgung von Instrumenten oder externen Markern durchführen, genutzt werden.
Die Navigationstechnologie hat sich bei chirurgischen Disziplinen mit starren Strukturen
bewährt, so z. B. in der orthopädischen Chirurgie, der Mund-, Kiefer- und Gesichtschirurgie
(MKG) und der Neurochirurgie [1].
Der Großteil der chirurgischen Navigationssysteme basiert auf optischer Trackingtechnologie.
Daneben werden zunehmend Systeme entwickelt, die elektromagnetisches Tracking unterstützen.
Elektromagnetisches Tracking eliminiert das Problem der Sichtverbindung. Außerdem
kann der Lagesensor in die Spitze des Geräts integriert werden. Dies ermöglicht die
Nutzung dieser Trackingtechnologie bei flexiblen Instrumenten. Diese beiden Vorteile
werden die zukünftigen, auf dieser Technologie basierenden Entwicklungen vorantreiben.
Navigationssysteme müssen in die intraoperativen Bildgebungsverfahren integriert werden,
um einen optimierten Arbeitsablauf zu schaffen.
Diese Integration beinhaltet die Bildübertragung und reibungslose Registrierungstechniken.
Zwei wesentliche Faktoren beeinflussen die Genauigkeit der chirurgischen Navigation.
Beim 1. Faktor handelt es sich um die Genauigkeit der Registrierung des 3-D-Datenträgers
beim Navigationssystem. Intraoperative Bildgebungsverfahren bieten den Vorteil eines
automatisierten Registrierungsprozesses, wodurch die Fehler menschlichen Handelns
minimiert werden ([Abb. 21]). Die äußerst reproduzierbaren Bewegungsabläufe eines fixen C-Bogen-Systems (z. B.
Artis zeego) unterstützen diesen Prozess durch die Integration des OP-Tisches. Somit
kennt der C-Bogen seine Position in Relation zum Tisch und verfügt über einen größeren
Bildausschnitt und einen hohen Dynamikbereich. Darüber hinaus können die Positionen
des C-Bogens mit einem einzigen Klick gespeichert und wieder abgerufen werden.
 Abb. 21 Die Integration des Artis zeego in den Operationstisch und das Navigationssystem
ermöglichen einen optimierten und beschleunigten Arbeitsablauf mit automatisierter
Registrierung beim Navigationssystem.
Abb. 21 Die Integration des Artis zeego in den Operationstisch und das Navigationssystem
ermöglichen einen optimierten und beschleunigten Arbeitsablauf mit automatisierter
Registrierung beim Navigationssystem.
Beim 2. wesentlichen Faktor, der für höchste Präzision entscheidend ist, handelt es
sich um die Richtigkeit der für die Navigation verwendeten 3-D-Daten. Es gibt viele
erdenkliche Gründe, weshalb die Morphologie der bildgebenden Daten verändert sein
kann, wenn diese nicht intraoperativ erworben wurden. Zu solchen Beispielen gehören
Veränderungen der Wirbelsäulenmorphologie durch die Patientenlagerung oder Brain-Shift
während einer Kraniotomie. Intraoperative 3-D-Bildgebung wird helfen, diese Herausforderungen
zu meistern, indem sie die Bilder für Navigationszwecke durch aktuelle, hochwertige
3-D-Scans auf den neuesten Stand bringt. Diese Updates können auch gemacht werden,
indem man eine auf einem intraoperativen Scan basierende, nicht rigide Deformation
auf die präoperativen Bilder anwendet.
Schlussfolgerung
Die Flachdetektortechnologie bietet präzisere Bilder, ein größeres Sichtfeld, weniger
Verzerrungen und mehr Platz für chirurgische Eingriffe und Instrumente.
Zudem werden die Flachdetektor-C-Bögen zunehmend erschwinglich und haben gegenüber
den Bildverstärkern die Vorteile der Motorisierung und höheren Präzision. Innovationen
bei mobilen C-Bögen mit Flachdetektortechnologie sind aktive Kühlsysteme für längere
Eingriffe, Motorisierung, Bedienfelder für den Chirurgen sowie eine Betriebsart mit
hoher Leistung für adipöse Patienten.
Gerade für komplexe Verletzungen, schwierige anatomischen Regionen oder anspruchsvolle
minimalinvasive Operationsverfahren ist der Hybridoperationssaal geeignet. Durch einen
intraoperativen Scan ist bspw. das komplette Becken visualisierbar. Des Weiteren zeichnet
sich der Hybrid-OP durch eine maximale Selbstständigkeit des Chirurgen aus, da der
C-Bogen vollständig durch den Operateur direkt am Operationstisch bedient werden kann.
Gerade im Rahmen der Polytraumaversorgung ist der Hybrid-OP aufgrund seiner multidisziplinären
Anwendbarkeit hervorragend geeignet. Mit all diesen Funktionen kann sich der chirurgische
Workflow mit modernen C-Bögen mit Flachdetektortechnologie signifikant verbessern
([Abb. 22]). Die Zukunft der intraoperativen Bildgebung liegt in der Flachdetektorbildgebung.
 Abb. 22 Effizientere Bildgebungsverfahren bedeuten mehr Zeit für den Chirurgen.
Abb. 22 Effizientere Bildgebungsverfahren bedeuten mehr Zeit für den Chirurgen.





